自动焊接机械手-旭航机械-焊接机械手





简述焊接机器人用途和用途各有不同
多设备都有许多的分类,不过它们分类的根据却各有不同。
焊接机器人普通会依据其各个型号的作用来辨别,也就是根据焊接机器人的用处来停止分类。
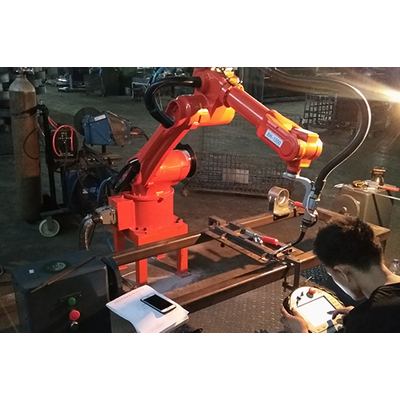
一、弧焊机器人。
由于弧焊工艺早已在诸多行业中得到****,弧焊机器人在通用机械、金属构造等许多行业中得到普遍运用。
弧焊机器人是包括各种电弧焊隶属安装在内的柔性焊接系统,而不只是一台以规划的速度和姿势携带焊枪挪动的单机,因此对其性能有着特殊的请求。
在弧焊作业中,焊枪应跟踪工件的焊道运动,焊接机械手视频,并不时填充金属构成焊缝。
因而运动过程中速度的稳定性和轨迹精度是两项重要指标。
普通状况下,焊接速度约取5-50mm/s,轨迹精度约为±0.2-0.5mm,由于焊枪的姿势对焊缝质量也有一定影响,自动焊接机械手,因而,希望在跟踪焊道的同时,焊接机械手,焊枪姿势的可调范围尽量大。
二、点焊机器人。
汽车工业是点焊机器人系统一个典型的应用范畴,在装配每台汽车车体时,大约60%的焊点是由机器人完成。
刚开始,点焊机器人只用于加强焊作业(往已拼接好的工件上增加焊点),后来为了保证拼接精度,又让机器人完成*焊接作业。

简述焊接机器人的*指标
焊接机器人的目标首要分为五个方面,这五个方面的特色和性质表现出了焊接机器人的五大目标。
1、适用的焊接办法和切开办法:
一般弧焊机器人只适用熔化****气体维护焊,不存在高频引弧会对机器人的控制和驱动系统干扰问题。
能否用于钨****弧焊,则决定于该机器人有没有特殊*干扰办法。
2、摇摆功用:
弧焊机器人有此要求。现有弧焊机器人的摇摆功用不同很大。选用能在空间范围内恣意设定摇摆方法和参数的机器人。
3、焊接P点示教功用:
对机器人示教是先示教焊缝上某一点的方位,后调整该点焊枪的姿势。
当调整姿势时,原示教点的方位应保持不变。也就是机器人应能主动补偿因调整姿势所引起的P点方位的改动,保证P点坐标,以便利示教操作者。
4、焊接工艺毛病自检和自处理功用:
焊接经常呈现一些工艺毛病,如弧焊时的粘丝、断丝、点焊时的粘电****等,若不及时采纳办法,则会发作损坏机器人或报废工件等大事故。
机器人有必要具有检出这类毛病并实时主动泊车正告的功用。
5、引弧和收弧功用为了保证焊接质量:
引弧和收弧时,需改动焊接参数,机器人在示教时应能设定和修正。

焊接机器手的结构设计
由于所设计的焊接机器手是在准平面、空间狭窄的环境下工作,为了保证机器人能根据电弧传感器的偏差信息,跟踪焊缝自动焊接,要求所设计的机器人应该结构紧凑、移动灵活且工作稳定.文中针对狭窄空间特点,开发了一种小型移动焊接机器人,根据机器人各结构的运动特点,运用模块化设计方法,把焊接机器手机构分为轮式移动平台、焊炬调节机构和电弧传感器三部分。其中,轮式移动平台由于其惯性大,响应慢,主要对焊缝进行粗跟踪,全自动焊接机械手,焊炬调节机构负责焊缝精d确跟踪,电弧传感器完成焊缝偏差实时识别.另外,机器人控制器和电机驱动器集成安装于机器人移动平台上,使其体积更小。同时,为了减少恶劣焊接环境下粉尘对运动部件影响,采用全封闭式结构,****其系统可靠性

自动焊接机械手-旭航机械-焊接机械手由高密市旭航机械科技有限公司提供。高密市旭航机械科技有限公司(www.gmxuhang*)在机械加工这一领域倾注了无限的热忱和热情,旭航机械一直以客户为中心、为客户创造价值的理念、以品质、服务来赢得市场,衷心希望能与社会各界合作,共创成功,共创*。相关业务欢迎垂询,联系人:乔总。同时本公司(www.gmxuhang.cn)还是从事自动焊,环缝自动焊机,自缝自动焊机的厂家,欢迎来电咨询。




