
泰安万川电器设备有限公司
万川电器价格合理_白山自动码垛机_自动码垛机生产销售
产品属性
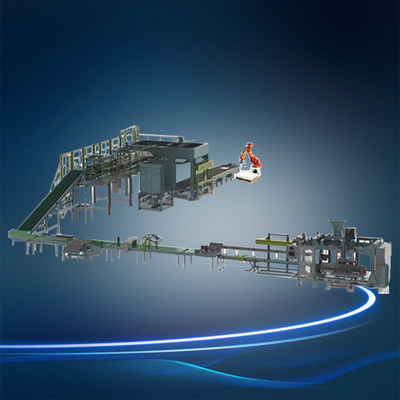
全自动码垛机器人工作流程
随着工业科技的发展以及人工成本的增加,使得码垛机器人在包装货物末端的应用越来越广泛;全自动码垛机器人会按照预先设置好的程序对包装好的物料进行自动有序的码垛堆放至托盘,码垛结束后由叉车叉走,整个工作过程完全自动化无需劳动力。

待码垛物料由包装线末端进入码垛线前端进行输送,经过倒包、转弯等步骤来到待码区,白山自动码垛机,此时码垛机收到指令进行抓取码垛到托盘中,这样就完成一次码垛。腾阳全自动码垛机器人速度可以达到1000次每小时。
倒包机:其与可升降缝包机连接,完成倒包工作,并且高度可调。
转弯输送机:实现90°转向输送。
振动整xing线:通过一组对压的动力滚筒与方辊形成的碾压振动效果,对通过的袋子进行整理,使包装袋物料整齐美观。
爬坡机:与可升降倒包机连接,自动码垛机供应,配合倒包机调节至合适角度,完成物料高度提升工作,达到合适的码垛高度。
空托盘传输线:存储一个空托盘,待码垛完成时,及时输送到码垛位置,节省时间。
托盘库:通过叉车一次性放置多层托盘,然后机器人码垛完成后,自动码垛机型号,此设备能自动给其补给一个托盘。

码垛机:将抓取线上的物料准确码垛放至待码垛区域。
码垛位托盘输送线:托盘送至该线体上,在此实现被抓取物料的码垛动作,码垛机输送末端可根据用户的不同需求,添加其他辅助设备(例如叉取托盘输送机等)。
全自动码垛机器人是实现企业自动化生产中重要的设备之一,不仅能为企业节约成本,让工厂的管理更加智能化,使生产区域干净整洁有序。
自动码垛机凭借灵活、gao效的搬运能力而深受用户喜爱,码垛机的出现大幅度减少了工作人员的劳动强度,但启动机器之后却发现码垛机运行异常,必须要进行quan面详细的检查之后才能判断原因,并且予以解决。
1、自动码垛机到位后出现接近开关无信号的问题
这时要做三个检查,首先是检查接近开关与感应板是否不对正或距离远;其次是检查接近开关相关接线是否松动或断线;另外是检查接近开关是否损坏。然后就可以根据检查结构,看是需要调整位置,重新接线还是更换受损的零部件。
2、自动码垛机到位后光电开关没有信号
同样的步骤,只是检查的零件不同而已,自动码垛机生产商,先要检查码垛机对射式光电开关发射端与接收端的位置,以及反射板式光电开关与反射板的位置,看其是否对正。同时还要检查直反式光电与被检测物体的距离,使其保持在合理的范围内,如果有*遮挡的话需要及时去除。
3、自动码垛机气缸动作后上磁环开关无信号
多数是因为码垛机的磁环开关位置不正引起的,这种情况下需要移动磁环开关,使其指示灯亮起,再固定磁环开关。另外,当码垛机的气缸杆没有完全伸出或缩回到位的时候也会有同样的后果,这时通过调节气缸缓冲垫就能解决了。

4、自动码垛机电磁阀的故障
当码垛机运行异常的时候,应该首先按下操作盘或现场按钮盒上的停止按钮,确定设备停机后再进行处理。必要时,断开设备电源,以****误启动,充分保证故障检查环境的安全性。
自动码垛机生产商|白山自动码垛机|万川电器价格合理(查看)由泰安万川电器设备有限公司提供。自动码垛机生产商|白山自动码垛机|万川电器价格合理(查看)是泰安万川电器设备有限公司(www.tawcdq*/)今年全新升级推出的,以上图片仅供参考,请您拨打本页面或图片上的联系电话,索取联系人:徐健。
