
巨鹿县欧润机械制造厂
主营:钢筋弯箍机,二次构造泵,饺子皮机,切菜机
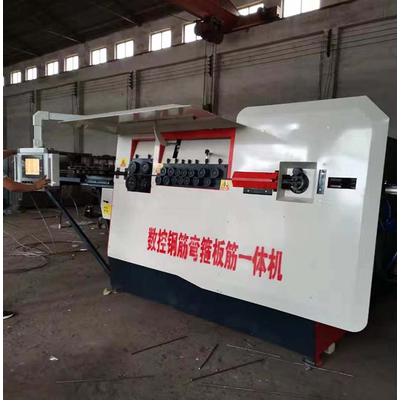
全自动数控弯箍机型号齐全-数控弯箍机-数控弯箍机价格报价
面议
中国
来电请说明在第一枪看到,谢谢!
产品属性





数控弯箍机的开环控制系统好不好
一般数控弯箍机的开环控制系统,对于*和大型的数控弯箍机而言,无论在精度方面,还是在控制速度方面,都不能得到较好的满足。这是由于数控弯箍机传动元件的传动误差总是不能完全消除,因而影响工作台的准确位移;或是由于大型弯箍机工作台的惯性大,过高的进给速度亦会影响工作台准确*的缘故。
因此,还必须采用闭环控制系统。闭环控制系统的特点,就是在控制回路中具有一个反馈测量装置。这种控制方式能保证弯箍机工作台的位移值与数控装置发出的脉冲值相一致,而不受弯箍机传动元件传动误差等影响。

建筑钢筋弯箍机的功能
全自动钢筋弯箍机的推出,成功的推动了国内的钢筋加工的产业革命。由于近几年国内劳动力成本持续升高,劳务人员文化程度和素质普遍不是太高,加工的钢筋箍筋角度控制不是很精,很难满足高铁桥梁的建设。该机*和工步行进中的调整功能成功的克服了这一问题。
电脑数控全自动钢筋弯箍机通过全智能高集成控制实现了从钢筋送料,去氧化皮,校直延伸,弯曲成型,全自动数控弯箍机批发价格,切断多种工艺单机一体活,采用智能控制,可以加工多种尺寸多种规格的方形,矩形,数控弯箍机,菱形、多边形等,全自动数控弯箍机定做加工,完成设计要求。

弯箍机运动的调整计算
弯箍机运动的调整计算按每一传动链分别进行。其一般步骤如下:
根据对弯箍机的运动分析,确定各传动链两端的末端件。例如,对于卧式车床的螺纹链来说,其末端件就是主轴一刀架。
根据计算位移量以及相应传动链中各个传动环节的传动比,列出运动平衡方程式。以此就可确定进给箱中变速齿轮的传动比和挂轮架配换齿轮。
如果传动链中换置器的传动比已经确定,就可从运动平衡方程式计算机床执行件的位移或运动速度。

全自动数控弯箍机型号齐全-数控弯箍机-数控弯箍机价格报价由巨鹿县欧润机械制造厂提供。巨鹿县欧润机械制造厂(www.tz1288*)位于河北省邢台市巨鹿县河北巨鹿经济开发区。在市场经济的浪潮中拼博和发展,目前欧润机械在肉制品加工设备中享有良好的声誉。欧润机械取得全网商盟认证,标志着我们的服务和管理水平达到了一个新的高度。欧润机械全体员工愿与各界有识之士共同发展,共创美好未来。

内容声明:第一枪网为第三方互联网信息服务提供者,第一枪(含网站、微信、百家号等)所展示的产品/服务的标题、价格、详情等信息内容系由卖家发布,其真实性、准确性和合法性均由卖家负责,第一枪网概不负责,亦不负任何法律责任。第一枪网提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与卖家沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪网举报并提供有效线索至b2b@dyq.cn