
北京中盛华奥科技发展有限公司
中科智联防撞系统公司-甘肃防撞系统-中盛华奥(查看)
产品属性






构成部分
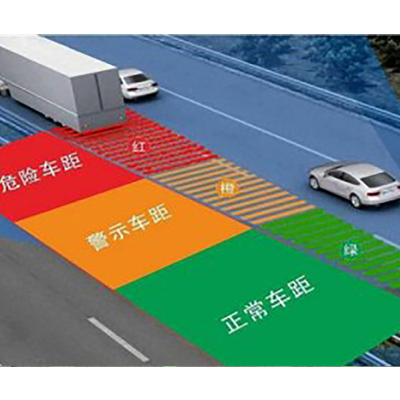
(1)信号采集系统:信采用毫米波雷达、激光、声纳、红外线、摄像头等技术自动测出本车速度、前车速度以及两车之间的距离;
(2)数据处理系统:计算机芯片对两车距离以及两车的瞬时相对速度进行处理后,判断两车的安全距离,汽车智能防撞系统,如果两车车距小于安全距离,数据处理系统就会发出指令;另外一种是计算机芯片计算两车碰撞时间(TTC)来计算危险程度,甘肃防撞系统,进而做出报警及刹车指令。
(3)执行机构:负责实施数据处理系统发来的指令,发出警报,提醒司机刹车,如司机没有执行指令,执行机构将采取措施,比如关闭车窗、调整座椅位置、锁住方向盘、自动刹车等。
想要了解更多汽车防撞系统的资讯
欢迎拨打图片上的热线电话!!!

工作原理可以归为以下四点:
一 . 跟踪识别。采用新型毫米波传感器,对本车行驶前方260米之内的目标进行准确探测,实时将探测距离数据传递给*处理器。
二.智能处理。*处理器根据雷达传递的探测距离数据,结合本车及前方目标车辆行驶速度进行综合分析、处理后,根据危险级别及时向报警显示系统或制动执行系统下达报警或制动指令。
三.自动报警。当本车与前方目标车辆小于安全距离时,中科智联防撞系统公司,报警系统以语音的形式执行*处理器下达的报警指令,提醒驾驶员谨慎驾驶。
四.自动制动。当本车即将与前方目标车辆发生追尾碰撞事故时,制动系统以减速或紧急制动的方式执行*处理器下达的制动指令,防撞系统合作,主动避免事故的发生。


工作原理
防撞系统工作时.信息采集系统能够分别对汽车行驶前方200米.以及汽车行驶后方3米内的障碍物进行实时探测.当*处理器计算出本车于前车或后方出现障碍物小于安全距离时.会立即通过报警系统向驾驶员发出语音报警,当系统警报提醒后驾驶员因疲劳驾驶反应迟钝或其他原因没有主动对本车采取减速.或避让障碍物等安全措施,或因操作失误,误将油门当刹车而导致追尾或倒车碰撞事故即将发生时.防撞器会根据危险级别.通过制动执行系统迅速对本车采取减速或紧急制动措施从而主动避免事故的发生。
想要了解更多汽车防撞系统的资讯
欢迎拨打热线电话!!!


中科智联防撞系统公司-甘肃防撞系统-中盛华奥(查看)由北京中盛华奥科技发展有限公司提供。北京中盛华奥科技发展有限公司(www.zk161*)实力雄厚,信誉可靠,在北京 房山区 的防撞用品等行业积累了大批忠诚的客户。公司精益求精的工作态度和不断的完善*理念将*中盛华奥和您携手步入*,共创美好未来!
