
山东奇安机械设备有限公司



定做奇安牌智能网联可编程拓展线控底盘实训台
产品属性
- 品牌:
- 奇安牌
- 材料:
- 金属
- 运输:
- 物流
- 包装:
- 简装
- 尺寸:
- 标准
- 品牌:
- 其他
- 型号:
- QA
- 类型:
- 智能网联汽车实训台
- 适用范围:
- 汽车维修实训
- 产地:
- 山东
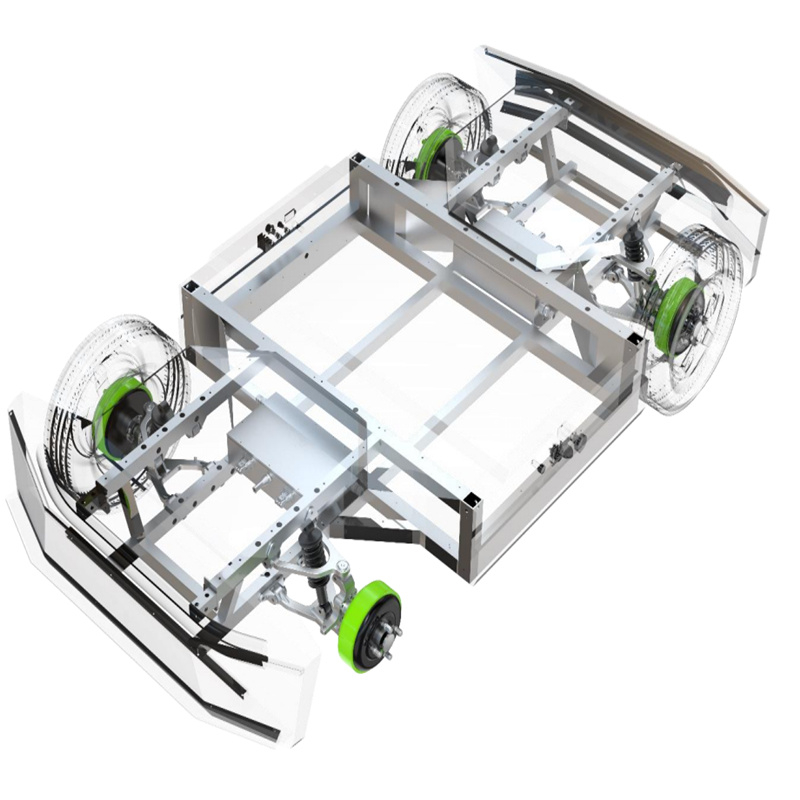
智能网联可编程拓展线控底盘
一、产品概述
本产品是全自主正向开发的智能化自动驾驶线控底盘车,整车采用模块化的设计理念,集车辆车身、车架、线控底盘、智能电器、线控驱动和无人驾驶系统于一体。适用于学校对外展示智能网联汽车的案例以及进行整车智能汽车控制系统研究的教学需求,高校可以在智能网联汽车上进行新课题的科学研究。
二、功能特点
1.整车采用轻量化车身和铝合金式车架,结构简单,便于搬运。
2.底盘代码开源可拓展,整车采用CAN2.0B车用标准化通讯协议,数据可通过ZLG、Valuecan等CAN分析仪进行采集,学生可通过分析仪结合总线协议进行以下单个系统(转向、制动、驱动)的控制。
▲3.配备模块化的四轮线控转向系统,可实现不同形式的前后轮转向模式,前轮单独转向,后轮单独转向,前后轮同向转向,前后轮异向转向。可通过CAN指令可进行转向角度和转向角速度控制,控制精度&plun;1°以内,指令发出到开始执行的响应时间<0.2s。
▲4.配备模块化的线控制动系统,采用电动液压主动增压的方案,通过CAN发出的不同的油压指令直接控制制动产生制动力,制动压力控制精度&plun;0.2Mpa,产生8Mpa的压力响应时间<0.25s。
▲5.配备模块化的分布式四轮轮毂电机驱动系统,采用轮毂电机系统,高扭矩输出,四个车轮可分别进行速度环控制、扭矩环控制;单个电机额定功率>4kw扭矩>210Nm。
▲6.底盘搭载的横摆角速度传感器,可输出横摆角速度、X轴和Y轴的加速度值。可用于车辆稳定性控制,车辆加速度控制。
▲7.配备模块化的智能电器系统,采用车规级整车控制器VCU进行式集成管理,进行底盘各执行器间的协调控制,底盘线束采用双保险丝盒,其中一路是底盘各系统的过流保护设计,另外一路为智能驾驶系统的过流保护设计预留。
▲8.配置集成式电子卡钳驻车系统,可实现静态驻车、静态释放、坡道防溜坡、坡道辅助起步、故障停车、行车紧急刹车等功能,可通过遥控器、EPB开关、CAN网络指令三种方式进行驻车和释放的控制。
▲9.配置远距离遥控器,遥控距离>1000m,底盘各功能可进行遥控操作,通过遥控可实现四种转向模式的切换和控制、档位的切换、车速的控制、行车制动和驻车制动的控制、灯光的控制(转向灯、刹车灯、大灯)、驾驶模式的切换(自动驾驶和遥控驾驶)。
▲10.整车线控底盘系统采用Matlab建模进行控制算法设计,学生可在Simulink中进行应用层的控制算法修改。
11.车辆对外预留多种接口,包括整车CAN通讯接口,电源接口,充电接口,程序刷写接口,方便进行二次开发、诊断、数据采集以及搭载其他功能需求的产品。
12. 整车配备常见故障产生按钮,学生可通过手动触发按钮产生故障,并检查故障来源。
三、考核项目
1.掌握智能网联线控底盘车的整体架构和系统方案
2.掌握和运用前后轮线控转向系统的控制原理和控制模型
3.掌握和运用线控制动系统的控制原理和控制模型
4掌握和运用四轮分布式驱动系统的控制原理和控制模型
5.掌握了解和运用智能线控底盘底盘控制的控制模型
6.掌握智能网联汽车常见故障诊断与分析