
东莞市鑫拓智能机械科技有限公司
主营:工业机器人,谐波减速器,控制系统


自动装配工业机器人
面议
中国 广东 东莞
来电请说明在第一枪看到,谢谢!
产品属性
- 材质:
- 金属
- 颜色:
- 橘黑
- 品牌:
- 其他
- 用途:
- 装配机器人
- 控制方式:
- 可编程控制机器人
- 驱动方式:
- 电动式
- 安装方式:
- 地面固定安装
- 操作机坐标形式:
- 多关节型工业机器人
- 加工定制:
- 否
- 型号:
- STR6-05
- 自由度数:
- 6
- 负载能力:
- 6-8KG
- 重复定位精度:
- 0.05
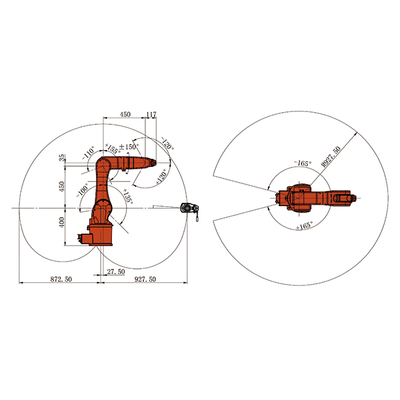
- 可达半径:
- 927.5
- 重量:
- 60KG
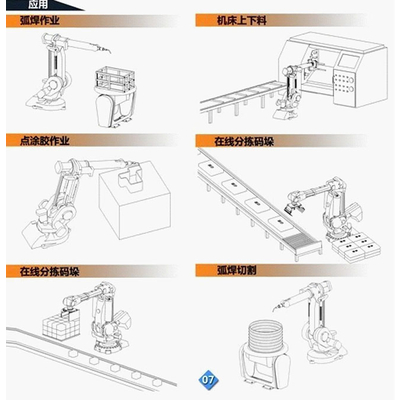
装配机器人是柔性自动化装配系统的核心设备,由机器人操作机、控制器、末端执行器和传感系统组成。其中操作机的结构类型有水平关节型、直角坐标型、多关节型和圆柱坐标型等;控制器一般采用多CPU或多级计算机系统,实现运动控制和运动编程;末端执行器为适应不同的装配对象而设计成各种手爪和手腕等;传感系统用来获取装配机器人与环境和装配对象之间相互作用的信息。
装配机器人的大量作业是轴与孔的装配,为了在轴与孔存在误差的情况下进行装配,装配机器人应使机器人具有柔顺性。主动柔顺性是根据传感器反馈的信息而从动柔顺心则利用不带动力的机构来控制手爪的运动以补偿其位置误差。
装配机器人主要用于各种电器制造(包括家用电器,如电视机、录音机、洗衣机、电冰箱、吸尘器)、小型电机、汽车及其部件、计算机、玩具、机电产品及其组件的装配等方面。
STR6-05机器人技术参数

STR6-05机器人外形尺寸与运动范围尺寸

鑫拓工业机器人:www.sentel-robot*
联系人:傅先生
电话:18718688554
邮箱:2375705231@**
内容声明:第一枪网为第三方互联网信息服务提供者,第一枪(含网站、微信、百家号等)所展示的产品/服务的标题、价格、详情等信息内容系由卖家发布,其真实性、准确性和合法性均由卖家负责,第一枪网概不负责,亦不负任何法律责任。第一枪网提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与卖家沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪网举报并提供有效线索至b2b@dyq.cn