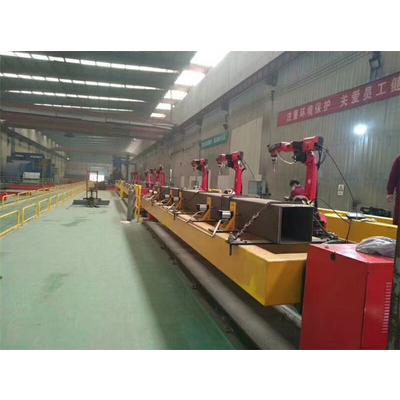
宝鸡机器人焊接生产线*价格合理-领诚电子










焊接机器人中点焊和弧焊机器人有哪些区别,该如何区分呢?
焊接机器人焊接已经成为焊接自动化技术现代化的主要标志。由于焊接机器人具有通用性强、工作可靠等优点,越来越受到人们的重视。自动焊接机器人是点焊机器人和弧焊机器人的总称。既然它们都是自动焊接机器人,应该如何区分呢?点焊机器人广泛应用于汽车行业。在组装每个车身时,很大一部分点焊是由机器人完成的。然而,当点焊机器人次出现时,机器人焊接生产线*,它仅用于增强焊接操作。后来,为了保证拼接精度,开始完成*焊接操作。随着弧焊技术在许多行业的广泛应用,弧焊机器人作为一种自动焊接机器人,被广泛应用于通用机械和金属结构等许多行业。在电弧焊操作中,焊枪应跟踪工件焊缝的移动,并不断填充金属以形成焊缝。因此,速度稳定性和轨迹精度是运动过程中的两个重要指标。现在人们再也不想去糟糕的焊接车间了。只要设置好焊接机器人的参数,焊接机器人就可以完成任务。焊接机器人是焊接结构生产的一部分,可以代替人工操作,完成复杂的由程序控制的焊接操作设备。使用焊接机器人来完成焊接任务只需要操作者教它一次,然后机器人可以很容易地重复每一步的教学。如果机器人被允许做另一项工作,它不需要改变硬件,只需要被再次示教。

框架自动焊接机器人
车架就像*骨架,关系到整车的*性和稳定性。与手工焊接相比,全自动框架焊接机器人的装配线焊接操作不受人的情感影响,焊接接头更均匀;从操作角度看,也比单臂机械焊接更稳定,使用全自动框架焊接机器人大大节省了人力资源,智能焊接使焊接质量更好,无论设备有多好,如果不细心呵护,它在总是出问题的时候,如何维护车架的自动焊接机器人?
侧装(倾斜)结构的主要优点是上下臂运动范围大,使机器人的工作空间几乎达到一个球体。因此,机器人可以倒挂在机架上工作,从而节省占地面积,方便地面物体的流动。然而,这种侧装机器人采用2轴和3轴悬臂结构,可以降低机器人的刚度。一般适用于小负载的机器人,用于电弧焊、切割或喷涂。平行四边形机器人的上臂由拉杆驱动。拉杆和下臂构成平行四边形的两侧。因此得名。
早期开发的平行四边形机器人工作空间相对较小(*于机器人前端),因此很难倒立工作。然而,自20世纪80年代末发展起来的新型平行四边形机器人能够将工作空间扩展到机器人的顶部、后部和底部,而且测量机器人不存在刚度问题,因此受到了广泛的重视。这种结构不仅适用于轻型机器人,也适用于重型机器人。近年来,大多数点焊机器人(负载100-150kg)采用平行四边形结构。

焊接机器人组成结构
焊接机器人主要包括机器人和焊接设备两部分。机器人由机器人本体和控制柜(硬件及软件)组成。而焊接装备,以弧焊及点焊为例,则由焊接电源,(包括其控制系统)、送丝机(弧焊)、焊枪(钳)等部分组成。对于智能机器人还应有传感系统,如激光或摄像传感器及其控制装置等。图1a、b表示弧焊机器人和点焊机器人的基本组成。
*生产的焊接用机器人基本上都属关节机器人,绝大部分有6个轴。其中,1、2、3轴可将末端工具送到不同的空间位置,而4、5、6轴解决工具姿态的不同要求。焊接机器人本体的机械结构主要有两种形式:一种为平行四边形结构,一种为侧置式(摆式)结构,如图2a、b所示。侧置式(摆式)结构的主要优点是上、下臂的活动范围大,使机器人的工作空间几乎能达一个球体。因此,这种机器人可倒挂在机架上工作,以节省占地面积,方便地面物件的流动。但是这种侧置式机器人,2、3轴为悬臂结构,降低机器人的刚度,一般适用于负载较小的机器人,用于电弧焊、切割或喷涂。平行四边形机器人其上臂是通过一根拉杆驱动的。拉杆与下臂组成一个平行四边形的两条边。故而得名。早期开发的平行四边形机器人工作空间比较小(局限于机器人的前部),难以倒挂工作。但80年代后期以来开发的新型平行四边形机器人(平行机器人),已能把工作空间扩大到机器人的顶部、背部及底部,又没有测置式机器人的刚度问题,从而得到普遍的重视。这种结构不仅适合于轻型也适合于重型机器人。近年来点焊用机器人(负载100~150kg)大多选用平行四边形结构形式的机器人。

宝鸡机器人焊接生产线*价格合理-领诚电子由郑州领诚电子技术有限公司提供。郑州领诚电子技术有限公司(www.lingchengdz*)有实力,信誉好,在河南 郑州 的电热设备等行业积累了大批忠诚的客户。公司精益求精的工作态度和不断的完善*理念将促进领诚电子和您携手步入*,共创美好未来!同时本公司(www.lcronglianlu*)还是从事中频熔炼炉,金属熔炼炉,金银铜铝熔炼炉的厂家,欢迎来电咨询。