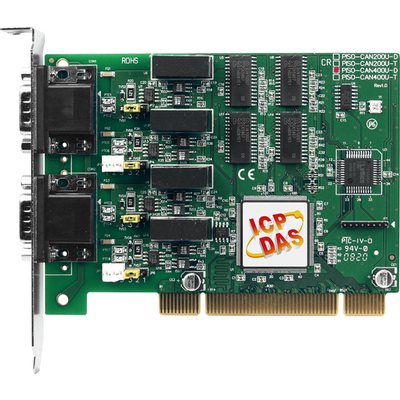


PISO-CAN400U通用PCI总线4口隔离CAN通讯卡
<*n style="color:#ff0000"><*n style="font-size:12pt">价格说明
<*n style="font-size:12pt">此价格为含税价格,订单中税费无需*统计。其他综合需求,请与我们联系。
<*n style="font-size:12pt">联系电话:18516008375、
<*n style="font-size:12pt">意见直通车
<*n style="font-size:12pt">如果您有任何意见或建议,请拨打18516008375 、021-80399544告诉我们
<*n style="font-size:12pt">
<*n style="color:#ff0000; font-size:14pt"><*n style="color:#ff0000">产品概述 通用PCI总线4口隔离CAN总线通讯卡、CAN口为DB9针接头
<*n style="font-size:12pt"> The CAN (Co*oller Area Network) is a serial communication protocol, and efficiently supports distributed real-time co*ol with*ery high level of security. It is an especially suit for networking "intelligent&quo*vices as well as sensors and actuators within a system or sub-system. In CAN networks, there is no addressing of subscribers or stati* in the conventional sense, but instead prioritized messages are tran*itted. As standalone CAN co*oller, PISO-CAN400/CAN200 can represents an economic solution of an active CAN board. It has two or four independent CAN bus communication ports with 5-pin screw terminal connector or 9-pin D-sub connector, and has the ability to cover a wide range of CAN applicati*. Besides, PISO-CAN400/CAN200 uses the new CAN co*oller Phillips SJA1000T and transceiver 82C250/251, which provide bus arbitration, error detection with auto correction and re-tran*ission function. It can be installed in a 5V PCI slot and supported truly “Plug & play”.
-
<*n style="font-size:12pt">Two independent CAN bus 2.0A/2.0B communication ports
-
<*n style="font-size:12pt">Compatible with CAN specification 2.0 parts A and B
-
<*n style="font-size:12pt">On-board optical isolation protection
-
<*n style="font-size:12pt">Programmable transfer rate up to 1 Mbps
-
<*n style="font-size:12pt">2500 Vrms photo couple isolation on the CAN bus
-
<*n style="font-size:12pt">Jumper select 120Ω terminator resistor for each port
-
<*n style="font-size:12pt">Direct memory mapping to the CAN co*ollers
- <*n style="font-size:12pt">33MHz 32bit 5V PCI bus (V2.1) plug and play
-
<*n style="font-size:12pt">Can be a CAN system monitor tool with CAN ca*
-
<*n style="font-size:12pt">It is a good tool to test CAN system
-
<*n style="font-size:12pt">Send/Receive/Record CAN messages.
-
<*n style="font-size:12pt">Provide cyclic tran*ission function
-
<*n style="font-size:12pt">Record the CAN messages with filtered ID and time stamp
-
<*n style="font-size:12pt">Support: Win98/Me/2000/XP-32bit/7-32bit/7-64bit (not for Win 7 Ultimate-64bit)


|
<*n style="font-size:12pt">4个*的CAN总线2.0A/2.0B通讯口 <*n style="font-size:12pt"> |


|
<*n style="font-size:12pt">   |
<*n style="font-size:12pt">Platform:
OS:Windows XP SP 3
CPU:Intel(R) Core(TM) i3 CPU 550 @ 3.20GHz
RAM:1.8GB
The 1/2 CAN ports send, receive or send/receive 100,000 CAN messages at the same time. The *erage FPS values are shown below:
| Baud rate (bps) | 1-CAN Port | 2-CAN Port | ||||||||||
| 2.0A, 8 bytes data | 2.0B, 8 bytes data | 2.0A, 8 bytes data | 2.0B, 8 bytes data | |||||||||
| TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | |
| 10K | 88 | 88 | 43 | 73 | 73 | 37 | 44 | 88 | 43 | 37 | 73 | 37 |
| 20K | 176 | 176 | 87 | 146 | 146 | 75 | 88 | 176 | 87 | 73 | 146 | 75 |
| 50K | 440 | 441 | 218 | 365 | 367 | 188 | 218 | 441 | 213 | 181 | 367 | 184 |
| 125K | 1088 | 1104 | 537 | 899 | 917 | 461 | 523 | 1104 | 509 | 436 | 917 | 432 |
| 250K | 2100 | 2208 | 1025 | 1745 | 1834 | 882 | 984 | 2208 | 935 | 832 | 1834 | 804 |
| 500K | 3975 | 4414 | 1856 | 3305 | 3668 | 1612 | 1739 | 4414 | 1769 | 1528 | 3667 | 1492 |
| 800K | 5930 | 7008 | 2787 | 4950 | 5830 | 2355 | 2501 | 6701 | 2609 | 2096 | 5825 | 2226 |
| 1M | 7129 | 8722 | 3216 | 5926 | 7257 | 2820 | 2879 | 8716 | 3023 | 2506 | 7259 | 2650 |
| Baud rate (bps) | 4-CAN Port | |||||
| 2.0A, 8 bytes data | 2.0B, 8 bytes data | |||||
| TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | TX (FPS) | RX (FPS) | TX/RX (Times/Sec) | |
| 10K | 22 | 88 | 22 | 18 | 73 | 19 |
| 20K | 44 | 176 | 44 | 36 | 146 | 38 |
| 50K | 109 | 441 | 108 | 91 | 366 | 93 |
| 125K | 265 | 1103 | 257 | 221 | 916 | 222 |
| 250K | 505 | 2205 | 492 | 424 | 1832 | 424 |
| 500K | 903 | 4409 | 917 | 782 | 3664 | 783 |
| 800K | 1365 | 7010 | 1317 | 1161 | 5546 | 1150 |
| 1M | 1598 | 8691 | 1541 | 1385 | 6901 | 1359 |






