高频雷达液位计品牌-高频雷达液位计-北京慧博新锐(查看)





超声波液位计易于使用,易于使用且成本低。然而,目前的超声波液位计具有一些缺点,例如反射问题,噪声和交叉问题。
反思问题
如果被检测物体始终处于直角,则超声波物位计将获得正确的角度。但不幸的是,在实际使用中,可以正确检测到很少的检测到的物体。可能还有错误。
2.镜面反射
这个问题与高中物理学中学到的光的反射相同。在一定角度,发出的声波被光滑物体镜面反射,因此不能产生回声并且不能产生距离读数。此时,超声波传感器将忽略该物体的存在。
3.三角错误
当被测物体与传感器成一定角度时,检测到的距离和实际距离具有三角形误差。
4.多次反射
当检测到类似结构的角落或物体时,这种现象很常见。传感器在多次反弹后接收声波,因此实际检测值不是真实距离值。这些问题可以通过使用以一定角度布置的多个超声波线圈来解决。通过检测多个超声波的返回值,它用于筛选出正确的读数。
5.噪音
虽然大多数超声波*的工作频率为40-45 Khz,但它们远远高于人类所能听到的频率。但是,周围环境也会产生类似频率的噪音。例如,电机在旋转过程中产生一定的高频率,车轮在硬地面上的摩擦产生的高频噪声,机器人本身的振动,甚至当有多个机器人时,高频雷达液位计,发出的声波通过其他机器人超声波传感器这将导致传感器接收错误信号。该问题可以通过对发送的超声波进行编码来解决,例如发送一组不同长度的声波,并且仅在探测器检测到相同的组合声波时计算距离。这可以有效地避免由环境噪声引起的误读。
6.交叉问题
当多个超声波液位计以一定角度安装在机器人上时会引起交叉问题。由超声波X发射的声波被传感器Z和Y镜面反射并获得。此时,Z和Y基于该信号计算距离值,从而不能获得正确的测量。


影响雷达液位计的因素和它适用的场合
雷达液位计是一直以*测量被各行业广泛应用,但是在现实使用时还会出现微小偏差,原因在测量范围*碍物的干扰了所能得到的精度。其中****主要的四点因素有:
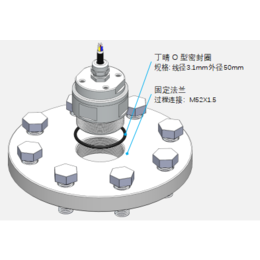
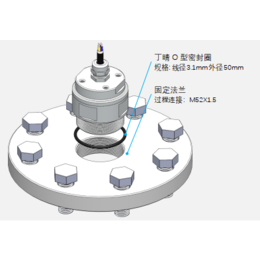
一:仪表内部及天线连接处的阻*跃变
二:罐内的障碍物的干扰反射;
三:由罐壁、罐、及罐底引起的多次反射;
四:液位表面的波纹造成的反*扰。
另外,介电常数也会对雷达液位计测量范围有一定影响,介电常数小,测量范围缩小,介电常数较大,测量范围*。
随着行业需求的不断增加,为了适应各种使用环境的特殊要求,雷达液位计也在不断的改进,高频雷达液位计品牌,适用范围也不断扩大,其中包括以下场合:
1.雷达液位计可用于测量*、*、含有强腐蚀性等介质环境中,特别适用于大型立罐和球罐等测量。
2、适用在含压力,真空、高温、寒冷等环境下使用雷达液位计,较低可达零下200 ℃的过程温度到较高可达400 ℃。
3.仪表的精度不同,满足不同的测量要求。
不同型号的雷达液位计各有特色,高频雷达液位计厂家,应根据实际环境使用要求、被测介质的温度、压力、腐蚀特性和使用空间尺寸等具体工况来分析,选择确定适合的型号


超声波液位计不适用于哪些场合
1、 真空环境下
根据超声波液位计的工作原理,在测量时候发出的声波需要通过介质进行传播,真空环境无法进行测量。
2、需要进行大量程和数据要求*的场合
雷达物位计公司小编告诉大家超声波属于机械波,在传播的过程中会出现衰减,所以实际的量程范围较小,精度略低,不适合在大量程和*的场合使用。
3、生产过程中高温高压的场合
超声波液位计依靠换能器,构成换能器的材料是压电陶瓷和塑性外壳,这种才料在高温高压的环境中不能使用,高频雷达液位计价格,一般的较大耐受温度只能达到80℃。
4、温度变化过于频繁的的场合
超声波液位计在实际应用中测量的距离值是通过时间×声速=距离得出得结论。随着温度的变化生速会发生变化,造成数据不准确,所以在温度变化过于频繁的场合并不适合应用超声波液位计。
高频雷达液位计品牌-高频雷达液位计-北京慧博新锐(查看)由北京慧博新锐科技有限公司提供。高频雷达液位计品牌-高频雷达液位计-北京慧博新锐(查看)是北京慧博新锐科技有限公司(www.wuweiji.cn)今年全新升级推出的,以上图片仅供参考,请您拨打本页面或图片上的联系电话,索取联系人:慧经理。