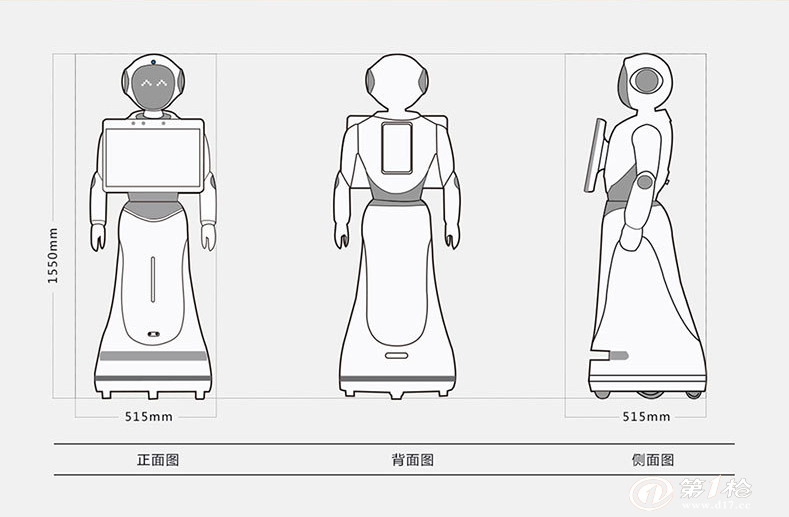
*多功能服务机器人人形迎宾机器人引导机器人激光导航
¥120000元/台
中国 江苏 苏州 昆山市
来电请说明在第一枪看到,谢谢!
| 功能 | 定义 | |||||||||
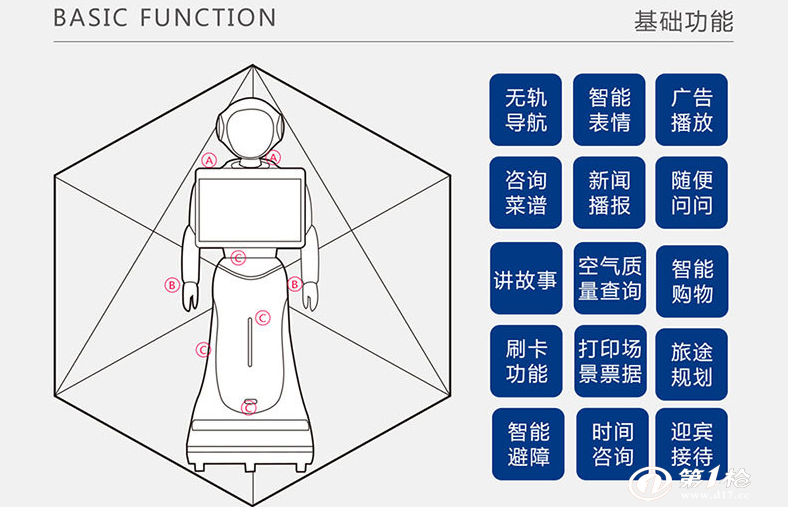
| 1、语音识别、语义理解 | 人与机器人交流,不单纯靠固定语句,可以从网络随机抓取问题*——人与机器人可以随意交流;可以用语音来控制机器人的运动(前进、后退、左转、右转等),可以以语音控制机器人到达指*置,例:请带我去***,机器人会*到位 | |||||||||
| 2、人脸识别 | 当客人初次出现在机器人面前时,机器人会对客人的面部图像进行采集,在通过人工输入个人信息,下次客人再出现在机器人面前时,机器人可以认出客人;通过在机器人内部存入个人照片及信息,当这个人出现在机器人面前机器人在采集到这个人的面部图像时会认出客人。 | |||||||||
| 3、触摸屏人机交互 | 1、单点触控2、屏上可以显示建筑物某一层的平面图,客人触碰触摸屏可以使机器人达到*点3、客人与机器人之间的交流内容要可以在屏幕上显示4、可以播放图片和视频5、电量、日期、设置等显示项和可操作项可以在屏幕上显示并可以触碰操作(例:设置机器人联网功能) | |||||||||
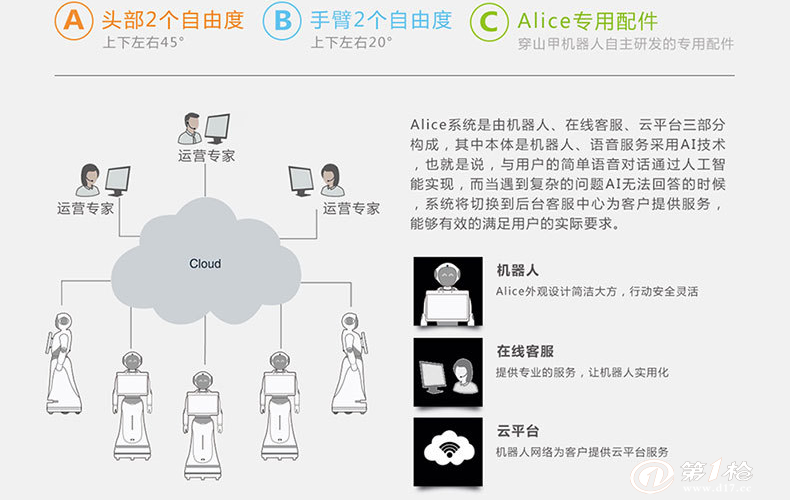
| 4、腰、头、手臂关节智能运动 | 1、在客人与机器人面对面交流互动时,机器人的手臂会有简单动作,大臂和小臂相对运动,待机时手臂不动 | |||||||||
| 5、无轨导航、避障 | 1、机器人运动不需要依靠磁条等外在限制,只使用激光传感器来实现导航;导航既可以有固定路线又可以是*点对点;机器人要有自我判断位置的能力2、避障时机器人会根据不同情况采用不同避障方案,如遇到固定不动的物体避障(绕开),遇到移动的物体则停障;避障或停障过程结束后机器人会按照原定的路线继续前进。3、有设置虚拟墙功能 | |||||||||
| 6、远程视频、遥控 | 1、可以通过手机APP与机器人另一面的人进行远程视频对话,并可以在手机上遥控机器人去到*的位置(预先在机器人地图上标注几个固定的位置点),也可以使用手机对机器人进行遥控,控制机器人去到未被标注的点 | |||||||||
| 7、打印场景* | 1、机器人身体内部安装打印机(标配58mm热敏打印机,确认的尺寸?)2、也可以根据用户要求选装不同尺寸打印机 | |||||||||
| 8、智能化表情 | 正常运行时微笑的表情,当运行中有障碍物(物体)表情不发生变化,当有人阻挡时,瞬间通过表情不发生变化,阻挡超过3s表情变成难过,伴随语言,阻挡超过6s表情变得愤怒或哭泣,伴随语言,语言内容及表情,用户可以自行更换 | |||||||||
| 9、路线显示、*到位 | 1、当有客人手动输入或语音“问路”时在机器人胸前屏幕上可以显示地图,并可以显示到达目的的路线图2、当客人需要机器人带领到指*置时,客人可以点击“带路”按钮,机器人可以带领客人到达位置。3、在机器背后有8.5寸显示器,可以显示导引的路线图。 | |||||||||
| 10、*、功能 | 1、可以实现采*员卡等信息2、通过采集到的信息实现某些功能3、例:刷办理会员、打印电影*、会员卡消费服务等 | |||||||||
| 11、播放广告(通过网络下发) | 可以通过网络直接下发广告文件给机器人,并实现机器人的自动播放,下发后原有的广告内容被替换,下发成功或失败要有文字提示;也可以插入U盘播放广告 | |||||||||
| 12、介绍、讲解功能 | 使用者可以通过触摸屏界面设置来输入讲解或介绍的语言内容,并且可以设置指*置、*语句 | |||||||||
| 13、主动迎宾功能 | 当机器人检测到客人时主动致意,同时伴随点头和语言(语言内容讨论待定) | |||||||||











以上内容为*多功能服务机器人人形迎宾机器人引导机器人激光导航,本产品由上海塍钾机器人有限公司直销供应。
声明:第一枪平台为第三方互联网信息服务提供者,第一枪(含网站、小程序等)所展示的产品/服务的标题、价格、详情等信息内容系由会员企业发布,其真实性、准确性和合法性均由会员企业负责,第一枪概不负责,亦不负任何法律责任。第一枪提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与该企业沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪举报并提供有效线索。我要举报