
深圳市巨力方视觉技术有限公司
主营:公司主要经营机器视觉系统集成、激光检测系统集成、运动控制系统集成等系统解决方案。


激光检测系统集成激光测速激光测距激光测长
面议
中国 广东 深圳 宝安区
来电请说明在第一枪看到,谢谢!
产品属性
- 精度:
- 根据客户需求
- 服务内容:
- 软件开发
- 所在地:
- 深圳宝安松岗格布大厦
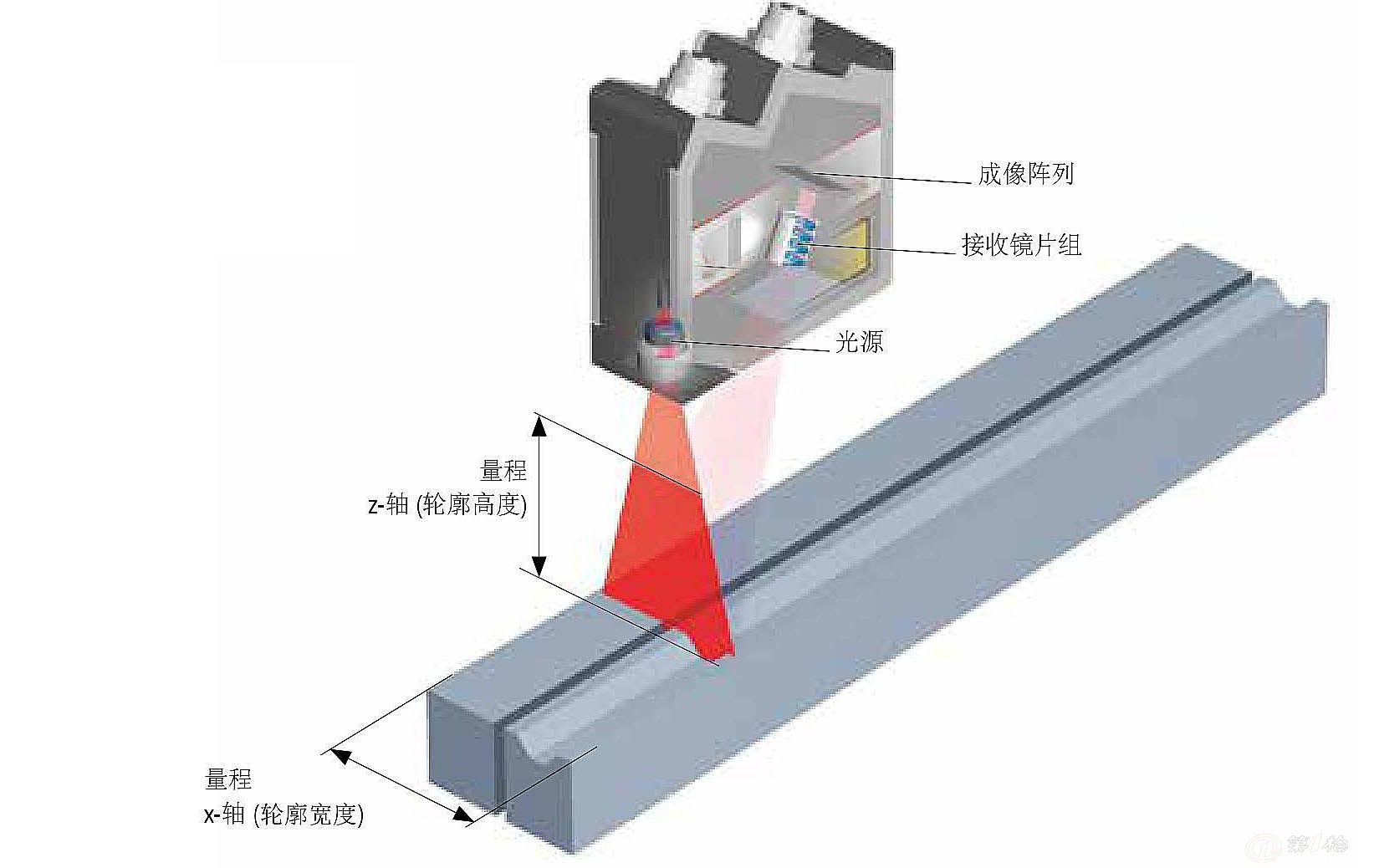
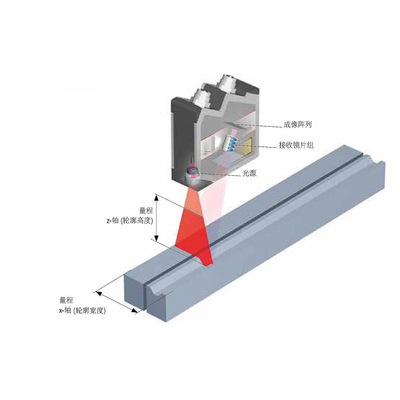
线激光测量时,高度敏感的感光元件CMOS矩阵可以接收从被测物体反射回来的光线,形成*轮廓影像。任何轮廓改变都会改变投射到被测物体表面的激光线的形状,从而改变感光器件矩阵上的影像结果。如果移动探头或者被测物体,可以得到若干扫描线轮廓,将这些轮廓合成就可以行成3D影像结果。这个影像也被称作“点云”,因为影像由数千个*测量点所组成。
****的技术,高1280测量点每扫描线;测量频率4000扫描线/秒。
应用范围:
等高,间隙,外轮廓,厚度,高度,深度,边沿,凹槽,角度,圆度,平整度,变形等*测量。
更多项目案例请访问巨力方视觉*,网址:http://www.julivision*
内容声明:第一枪网为第三方互联网信息服务提供者,第一枪(含网站、微信、百家号等)所展示的产品/服务的标题、价格、详情等信息内容系由卖家发布,其真实性、准确性和合法性均由卖家负责,第一枪网概不负责,亦不负任何法律责任。第一枪网提醒您选择产品/服务前注意谨慎核实,如您对产品/服务的标题、价格、详情等任何信息有任何疑问的,请与卖家沟通确认;如您发现有任何违法/侵权信息,请立即向第一枪网举报并提供有效线索至b2b@dyq.cn