
深圳市英傲科技有限公司

两相步进电机驱动器 UCD-20403
产品属性
- 电阻:
- >100MΩ
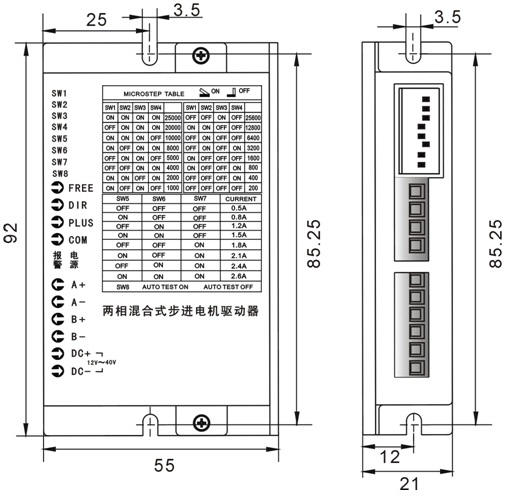
- 尺寸:
- 92×55×21mm
- 重量:
- 0.2KG
- 品牌:
- 其他
- 类型:
- 其他
- 适用范围:
- 工业用
- 极数:
- 2极
- 型号:
- UCD-20403
- 额定电压:
- 12-40
- 额定电流:
- 2.6
技术特点
32位DSP数字式控制方式
低震动、低噪音、低功耗
柔性细分,运行更平稳
输入信号光电隔离
空间矢量双****恒流驱动
****输出驱动电流2.6A/相
提供节能的自动半电流锁定功能
****25600步/转的十六种细分模式可选
可适应共阳、单脉冲模式
通过CE认证
【注】本说明书只针对标准产品,不包含根据客户需求定制产品的要求。
电气特性(环境温度Tj=25℃时)
典型接线图
【提示注意】由于储运环境温度的剧烈变化,容易产生凝露或结霜,此时应把驱动器放置12小时以上, 待驱动器温度与环境温度一致后方可通电运行。
显著特点
数字步进驱动器采用32位DSP为内核的全数字控制方式,****的空间矢量算法优化低速振动和高速性能,可以实现多种电机的自适应匹配寻优控制方法,软件更新、升级方便。
采用了柔性细分算法,使驱动器无论设置何种细分电机都可保持****的运行性能,****大的****了低细分下的平稳性和噪音。即使用户由于控制系统输出脉冲频率的限制不能采用较高的细分选择,也可以获得低速平稳性和高速性的兼得,从而降低对控制系统的要求,有利于降低系统的整体成本****性能。低震动、低噪音和低功耗。
电源
数字步进驱动器内部的开关电源设计保证了可以适应较宽的电压范围,用户可根据各自的情况在12V到40VDC之间选择,容量与所匹配的电机和设定的电流大小有关。一般来说较高的额定电源电压有利于****电机的高速力矩,但却会加大驱动器的损耗和温升。电源务必注意****性,切忌反接。
细分选择
用户可以通过驱动器面板上的*、2、3、4四位拨码开关选择共16种细分模式,用电机每转的步数标识,既可以实现常用的两相步距(如两相标准半步400步/转)也可以提供类似五相的步距(如五相标准半步1000步/转),用户可以根据需要自行选择细分(详见细分模式选择表)。注:用户对细分模式的更改需要驱动器重新上电方可生效。用户有其他非标准的细分要求时需联系厂家定制。
输出电流选择
数字步进驱动器采用双****恒流方式,****输出电流值为2.6A/相 (峰值),通过驱动器侧板第5,6,7三位开关的不同组合可以方便选择8种电流值,从0.5A到2.6A(详见电流选择表),(注意:这里所说的电流是指驱动器每相输出正弦波电流的峰值,使用串电流表的方式不能得到正确的读数。)
注:用户对输出电流的更改必须给驱动器重新上电才可生效。用户有其他非标准的电流要求时需联系厂家定制。
输入信号波形和时序
自测模式开关
用户可以通过驱动器面板上的第8位拨码开关选择自测模式的开放与关闭,自测模式开放时驱动器将在每次上电之初对电机参数进行观测,并自动寻求****控制参数。自动测试功能关闭时驱动器将调用上一次测量的电机参数进行工作。因此当用户*使用驱动器和电机时应该采用自测模式进行电机参数的自适应匹配,之后就可以将开关设定为OFF锁定当前参数。当工作状态发生变化后可以重新自测寻优。自测设定只在每次驱动器上电时进行处理,因此SW8状态的变化只能在驱动器重新上电后生效。
单脉冲方式
数字步进驱动器支持标准单脉冲模式,步进脉冲由脉冲端口接入,由方向端口的电平高低决定电机的运转方向。注:在开启自测功能时,驱动器上电10秒后才可正常接收脉冲。关闭自测功能驱动器可以在加电5秒后正常响应指令信号。
自动半电流
数字步进驱动器工作若连续0.1s没有接收到新的脉冲则自动进入半电流状态,相电流降低为标准值的50%,达到降低功耗的目的,在收到新的脉冲时驱动器自动退出半电流状态。
脱机功能
输入脱机信号时,驱动器将切断电机各相绕组电流使电机轴处于自由状态,此时步进脉冲将不能被响应。此状态可有效降低驱动器和电机的功耗和温升。脱机控制信号撤消后驱动器自动恢复到脱机前的相序并恢复电机电流。当不需用此功能时,脱机端可悬空。
过压保护
当电源电压波动或电机制动等原因造成直流母线电压超过45VDC时,驱动器过压保护电路动作,驱动器暂停驱动电机,需人工断电再上电才可解除。出现该故障后用户需要检查电源电压,适当降低输入的电源电压。
欠压保护
数字步进驱动器检测到输入直流母线电压低于10VDC时,驱动器欠压保护电路动作,切断电机绕组输出停止运行,需人工断电再上电才可解除报警。出现该故障后用户需要检查电源电压和容量,适当****输入的电源电压。
功能状态指示
*LED 为电源指示灯,当驱动器接通电源时,该LED 常亮;当驱动器切断电源时,该LED 熄灭。红色LED 为故障指示灯,当出现故障时,该指示灯以不同方式亮灭。红色LED不同的亮灭方式代表不同的故障信息,具体关系如下表所示:
控制信号
数字步进驱动器的接线端子采用可拔插端子,可以先将其拔下,接好线后再插上。输入控制信号采用共阳接口形式。当控制信号幅值高于TTL电平时,应根据信号电压大小在各信号输入端口(非公共端)外串限流电阻,如24V时,外串2KΩ电阻。每路信号都要使用单独的限流电阻,不要共用。
公共端:本驱动器的输入信号采用共阳****接线方式,用户应将输入信号的电源正****连接到该端子上,将输入的控制信号连接到对应的信号端子上。控制信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中。
脉冲信号输入:该脉冲信号下降沿被驱动器解释为一个有效脉冲,并驱动电机运行一步。为了确保脉冲信号的可靠响应,脉冲低电平的持续时间不应少于5μs。本驱动器的信号响应频率为60KHz,过高的输入频率将可能得不到正确响应。
方向信号输入:该端信号的高电平和低电平控制电机的两个转向。该端悬空被等效认为输入高电平。控制电机转向时,应确保方向信号****脉冲信号至少5μs建立,可避免驱动器对脉冲的错误响应。
脱机信号输入:内部光耦处于导通状态时电机相电流被切断,转子处于自由状态(脱机状态)。光耦关断后电机电流恢复到脱机前的大小和方向。当不需用此功能时,脱机信号端可悬空。 脱机信号撤销至少100μs后驱动器才能正常响应指令脉冲。
控制信号
数字步进驱动器的接线端子采用可拔插端子,可以先将其拔下,接好线后再插上。输入控制信号采用共阳接口形式。当控制信号幅值高于TTL电平时,应根据信号电压大小在各信号输入端口(非公共端)外串限流电阻,如24V时,外串2KΩ电阻。每路信号都要使用单独的限流电阻,不要共用。
公共端:本驱动器的输入信号采用共阳****接线方式,用户应将输入信号的电源正****连接到该端子上,将输入的控制信号连接到对应的信号端子上。控制信号低电平有效,此时对应的内部光耦导通,控制信号输入驱动器中。
脉冲信号输入:该脉冲信号下降沿被驱动器解释为一个有效脉冲,并驱动电机运行一步。为了确保脉冲信号的可靠响应,脉冲低电平的持续时间不应少于5μs。本驱动器的信号响应频率为60KHz,过高的输入频率将可能得不到正确响应。
方向信号输入:该端信号的高电平和低电平控制电机的两个转向。该端悬空被等效认为输入高电平。控制电机转向时,应确保方向信号****脉冲信号至少5μs建立,可避免驱动器对脉冲的错误响应。
脱机信号输入:内部光耦处于导通状态时电机相电流被切断,转子处于自由状态(脱机状态)。光耦关断后电机电流恢复到脱机前的大小和方向。当不需用此功能时,脱机信号端可悬空。 脱机信号撤销至少100μs后驱动器才能正常响应指令脉冲。
典型接线图

输入接口电路

输入信号波形和时序

外形尺寸图
使用注意事项:
- 由于储运环境温度的剧烈变化,容易产生凝露或结霜,此时应把驱动器放置12小时以上,待驱动器温度与环境温度一致后,方可通电运行。若长时间贮存在非适宜环境中,运行前应重新检测产品的质量。
- 为了更好的使用本驱动器,用户在系统接线时应遵循功率线(电机相线,电源线)与弱电信号线分开的原则,以避免控制信号被干扰。在无法分别布线或有强干扰源(变频器,电磁阀等)存在的情况下,****使用屏蔽电缆传送控制信号。采用较高电平的控制信号对抵*干扰也有一定的意义。
- 电源质量的好坏直接影响到驱动器的性能和功耗,电源的纹波大小影响细分的精度,电源共模干扰的*能力影响系统的*干扰性,因此对于要求较高的应用场合,用户一定要注意****电源的质量。
- 驱动器的输出电流是指驱动器每相输出电流的峰值,使用串电流表的方式不能得到正确的读数。
- 驱动器安装时应保证设备的通风良好,并定期检查散热风扇运转是否正常;机柜内有多个驱动器并列使用时要保证相互之间的距离不小于5CM。
- 用户若对驱动器的电源电压、电流、细分、信号端口等有****要求的,请与厂家联系,可根据客户需求进行产品定制,产品型号末尾标注Ver*.*的标示为特殊定制品,*.*为特殊定制版本号。本说明书只针对标准产品,不包含根据客户需求定制产品的要求。