
无锡固途焊接设备有限公司
管法兰焊接,无锡固途焊接设备(在线咨询),直管法兰焊接
产品属性


(1)开放性模块化的控制系统体系结构:采用分布式CPU计算机结构,分为机器人控制器(RC),运动控制器(MC),光电隔离I/O控制板、传感器处理板和编程示教盒等。机器人控制器(RC)和编程示教盒通过串口/CAN总线进行通讯。机器人控制器(RC)的主计算机完成机器人的运动规划、插补和位置伺服以及主控逻辑、数字I/O、传感器处理等功能,而编程示教盒完成信息的显示和按键的输入。
(2)模块化层次化的控制器软件系统:软件系统建立在基于开源的实时多任务操作系统Linux上,采用分层和模块化结构设计,以实现软件系统的开放性。整个控制器软件系统分为三个层次:硬件驱动层、核心层和应用层。三个层次分别面对不同的功能需求,对应不同层次的开发,系统中各个层次内部由若干个功能相对对立的模块组成,这些功能模块相互协作共同实现该层次所提供的功能。
(3)机器人的故障诊断与安全维护技术:通过各种信息,对机器人故障进行诊断,并进行相应维护,是保证机器人安全性的关键技术。
(4)网络化机器人控制器技术:目前机器人的应用工程由单台机器人工作站向机器人生产线发展,机器人控制器的联网技术变得越来越重要。控制器上具有串口、现场总线及以太网的联网功能。可用于机器人控制器之间和机器人控制器同上位机的通讯,便于对机器人生产线进行监控、诊断和管理。
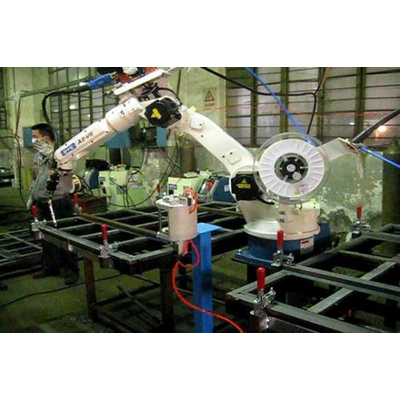
弧焊机器人的特点

 弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。
弧焊机器人多采用气体保护焊方法(MAG、MIG、TIG),通常的晶闸管式、逆变式、波形控制式、脉冲或非脉冲式等的焊接电源都可以装到机器人上作电弧焊。由于机器人控制柜采用数字控制,而焊接电源多为模拟控制,所以需要在焊接电源与控制柜之间加一个接口。
近年来,国外机器人生产厂都有自己特定的配套焊接设备,在这些焊接设备内已经插入相应的接口板,所以弧焊机器人系统中并没有附加接口箱。应该指出的是,在弧焊机器人工作周期中,电弧时间所占的比例较大,因此在选择焊接电源时,一般应按持续率100%来确定电源的容量。送丝机构可以装在机器人的上臂上,也可以放在机器人之外,前者焊枪到送丝机之间的软管较短,有利于保持送丝的稳定性,而后者软管校长,当机器人把焊枪送到某些位置,使软管处于多弯曲状态,会严重影响送丝的质量,所以送丝机的安装方式一定要考虑保证送丝稳定性的问题。


工作站是专门针对箱柜行业中,生产量大,焊接质量及尺寸要求高的箱体焊接开发的机器人工作站*装备。
箱体焊接机器人工作站由弧焊机器人、焊接电源、焊枪送丝机构、回转双工位变位机、工装夹具和控制系统组成。该工作站适用于各式箱体类工件的焊接,在同一工作站内通过使用不停的夹具可实现多品种的箱体自动焊接,焊接的相对位置高。由于采用双工位变位机,焊接的同时,其他工位可拆装工件,****大的****了焊接效率。由于采用了MIG脉冲过渡或CMT冷金属过渡焊接工艺方式进行焊接,使焊接过程中热输入量大大减少,保证产品焊接后不变形,通过调整焊接规范和机器人焊接姿态,保证产品焊缝质量好,焊缝美观,特别对于密封性要求高的不锈钢气室,焊接后保证气室气体不*。通过设置控制系统中的品种选择参数并更换工作夹具,可实现多个品种箱体的自动焊接。